Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
This is a page not in th emain menu
Published:
This is a sample excerpt.
This is a trial. 
Short description of portfolio item number 1
Short description of portfolio item number 2
We develop general methods for building data-driven models for dynamic systems, based on these models accelerate the computational simulation of these systems, and eventually to significantly benefit the design and control of complex systems. The problems we are tackling are generally characterized by ‘high-dimensional low-data’ regime. To build widely adoptable data-driven models for dynamic systems in such regime, we rely on three hierarchical levels of merits: interpertability, generalizability, and robustness.
Force identification is an inverse technique to localize and reconstruct external forces on structures based on the structure reponses. In engineering practice, when directly measuring the external forces is physically or economically infeasible, we resort to force identification techniques. Potential applications include machine tool force prediction, vehicle weigh-in-motion systems, and structural health monitoring.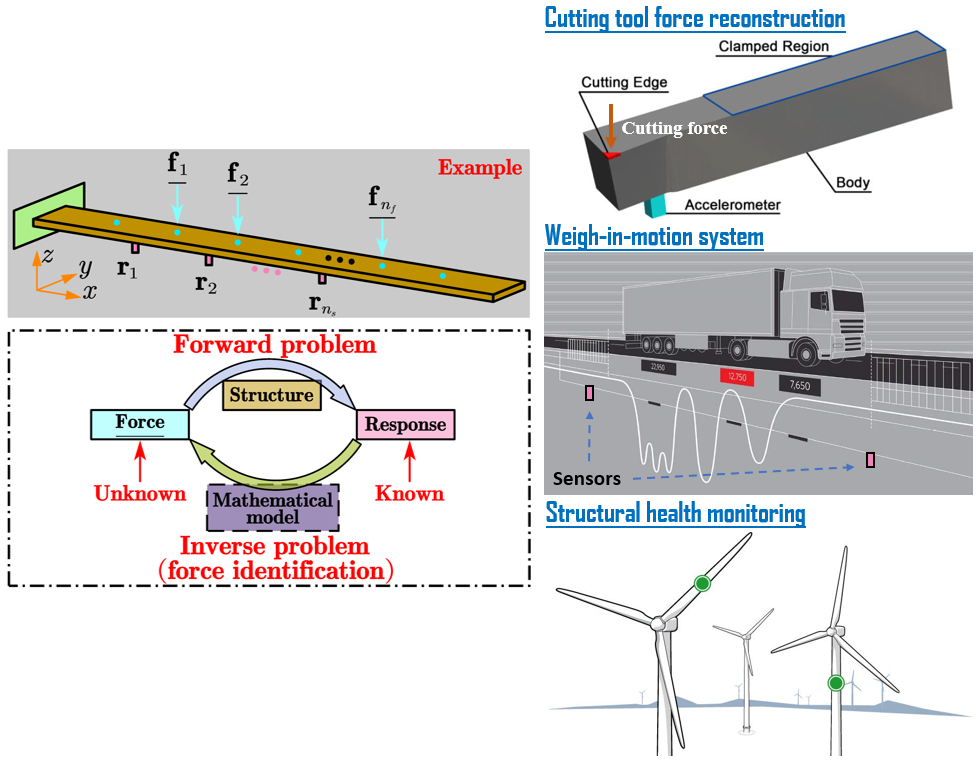
The ocean possesses enormous sustainable and renewable energy in the form of wave, current, salinity difference, and temperature difference. We exploit this energy fountain, by designing multi-scale machinery to convert the largely untapped wave and hydrokinetic energy. We solve the challenges from 3 perspectives: hydrodynamics, power take-off, and control.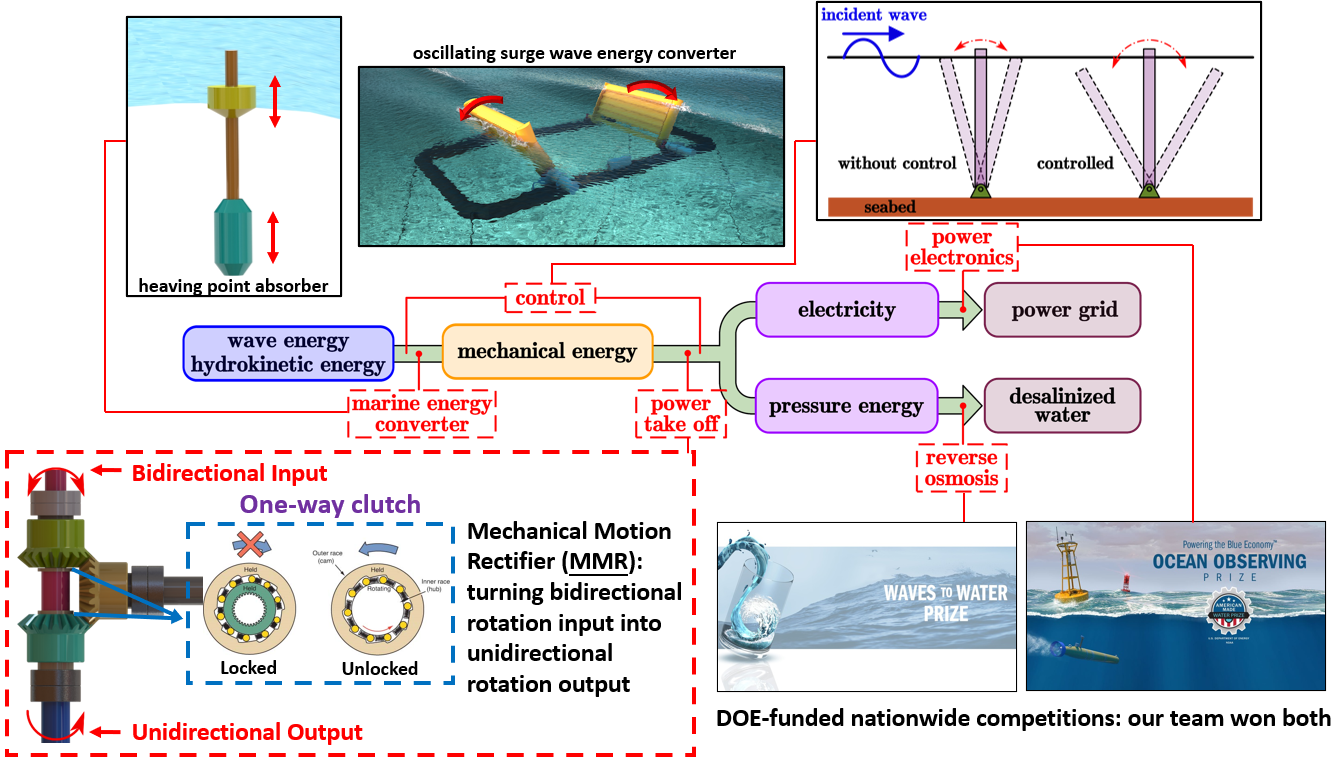
Soft robotics are unconventional robotic systems that constituted by soft materials and that allows for maneuvering, sensing, and interacting with unconventional environmetns. (To be finished)